Я не копирайтер и никогда не практиковался в написании постов, я практикуюсь в разработке ПО(профессионально и давно) а также в схемотехнике(хобби). Здесь не будет красивого изложения.
К тому же я хочу донести общий смысл, а не заострять много внимания на деталях.
В общем я даже не буду пытаться соответствовать шаблону крутого спеца. Просто прошу обращать внимание не на мою личность, и форму подачи материала, а конкретно на вопросы о которых буду писать.
И да, у меня будут проскакивать различного рода ошибки, прошу прощения, а также прошу проходить мимо, если Вас это напрягает. Я здесь не для того, чтобы показать какой я умный и на сколько хорошо знаю правила русского языка.
А пишу я этот пост, просто потому, что меня(в том числе и как потребителя) очень сильно напрягает положение дел касаемо домашней автоматизации. И я вижу альтернативное решение. Благо я волен сам выбирать как функционал ПО, так и оборудование на котором строю свое решение.
Я всегда стараюсь исходить из задачи. Задача - я хочу автоматизацию в квартире, гараже. А далее на даче, когда она у меня будет. Да и вообще где угодно, автоматизация везде полезна.
Конкретно, для квартиры я хочу следующее:
Вода: счетчики на горячую и холодную воду(т.е. автоматический съем с них показаний и либо передача в центр приема показаний или информирование мне). Проверка на протечку и перекрытие поступления воды от стояков. Съем температуры со стояка горячей воды. Съем показаний с теплосчетчика(если получится его использовать, в моем случае проблемы с нашими законами, а не техническая).
Климат: Датчики температуры, влажности, в каждом помещении(и С02 датчики в жилых помещениях). Управление запорной арматурой батарей отопления(для регулировки темпрературы в помещении). Управление вентиляцией.
Безопасность: Датчики открытия на каждое окно, входную дверь(и на некоторые двери внутри квартиры). Датчики дыма.
Электрика: Диммирование ламп накаливания(я не сторонник светодиодного освещения), управление светом для остальных типов ламп(вкл/выкл). Управление(очень желательно) каждой розеткой в доме. Съем показаний с электросчетчика. Управление электрозамком на входной двери и еще в паре мест в квартире соленоидом.
Ну и прочее: Съем температуры в ларе(морозильник), метеостанция, счетчик Гейгера и прочее, прочее, прочее. А вот еще - универсальный модуль в каждую жилую комнату, который сможет управлять кондишкой, телевизором и прочим по ИК, сможет принимать команды по ИК от пульта, сможет работать ночником и прочее. А еще можно подружить Wi-Fi точку доступа или Bluetooth и клиента с сценариями для управления охранкой и открытием двери, домофоном и прочее.
В общем размах очень большой. При этом я не рассматриваю всякие системы типа умных чайников и прочая лабуда мне оно откровенно не нужно. Также как и всякого рода шпионы типа умных колонок с Алисой.
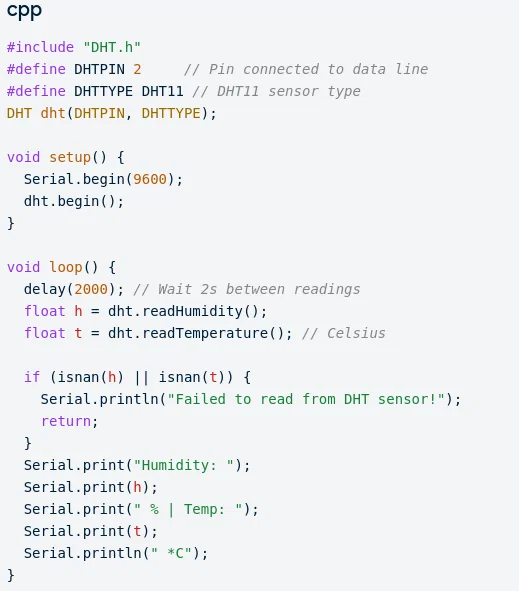
Главное, я могу написать софт сам, а еще мне интересны микроконтроллеры типа старых ATmega 8(AVR), которые несколько лет назад изучил очень детально(без Ардуино). И которые, во всяком случае были, намного дешевле остального на рынке. Я могу писать и на STM но я не любитель Си, я люблю ассемблер, а ассемблер у кортексов мне не нравится.
Главный вопрос, в какую сумму мне все это встанет? Как мы видим, здесь только одних умных розеток будет несколько десятков. В общей сложности всех устройств будет явно больше сотни.
Разумно ли в этом случае рассматривать беспроводные решения? Я считаю, что это совершенно не разумно. Вот причины:
1) Wi-Fi забит соседями, сам стандарт не рассчитан, чтоб на небольшом простанстве было такое количество устройств - проблемы со связью будут обеспечены.
2) Безопасность, любой радио интерфейс могут заглушить и вероятно прослушать, подменить. Т.е. датчики на окнах и дверях могу быть просто заглушены, и мы никогда не узнаем, что дверь открывали.
3) Питание. Автономное от батарей - значит через некоторый период придется менять ближе к сотни батарей. Не автономное - значит у вас в квартире будет около сотни импульсных блоков питания(чревато возгоранием и влиянием на здоровье)
4) Безопасность. Более того, насколько мне известно в России никому не интересны Российские разработки в данной отрасли, все просто покупают кастомизацию зарубежных решений(типа Tuya), даже китайцы типа Midea. Все эти железки в вашем доме соединяются скорее всего с зарубежными серверами. Технически вас могут слушать, воровать ваши личные данные(те-же пароли введенные через беспроводную клавиатуру). И кто знает как они могут повлиять на ваши исполнительные устройства. Самое простое, что они могут сделать - это окирпичить весь ваш умный дом просто отказав в обслуживании.
5) Ну и такие мелочи как высокая цена, большие размеры устройства, электромагнитное излучение, высокочастотный слышимый шум.
* конечно, где-то что-то реализовано по уму и есть исключения, но общую картину я думаю описал достаточно верно.
И исходя из вышесказанного, плюс из того, что я могу сам создать устройства и софт, я конечно выбрал свой велосипед. А главное, я выбрал его давно, когда тема умных домов была еще не так популярна.
Решение представляет собой сервер, контроллер(оптимально ставить один контроллер на одну локацию, например квартиру), клиент и конечные устройства(датчики, устройства управления, модули, шлюзы и прочее).
Я использую проводное решение. Смотрим RS-485. Устройства вешаются параллельно, шина(как на елочной гирлянде). Достаточно одного кабеля. Т.е. одна шина(лучше две витых пары, подойдет сетевой компьютерный кабель UTP). Желательно поставить шлюз с гальванической развязкой и отдельным питанием на каждое большое помещение. И да, главная сложность провести эту шину до всех устройств. Я, в основном, использовал плинтуса. Буду делать ремонт в квартире - уберу все в стены. Также как и компьютерную сеть, проводной гигабит лучше Wi-Fi, а еще лучше 10 гигабит..
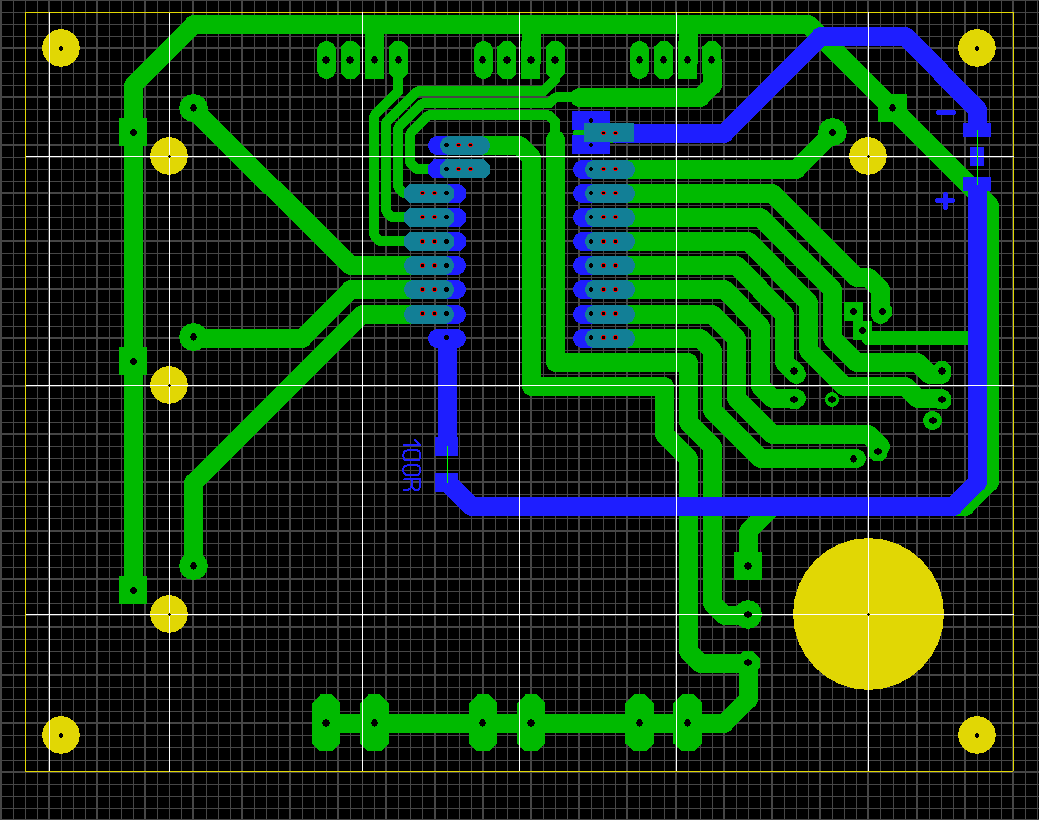
Занимаюсь я этим около 10 лет. Довольно редко, ведь это хобби. Какие-то устройства ставлю, какие-то снимаю. И я подустал, многое снял(снял старые мало функциональные версии, а новые многофункциональные - пока просто не дошли руки). Установка и съем никак не повлияли на стандартную электрику! Сейчас у меня около 10 умных розеток, управляемое освещение во всех комнатах, несколько датчиков дверей, своя охранка, несколько датчиков температуры. Есть очень много различных наработок, что-то даже спаяно и это просто нужно подключить. Например в ближайшее время я буду менять 4 счетчика воды. Уже лежат для замены(с импульсными выходами). Платы модулей для них начерчены, надо заказать печать PCB, паяю пока сам. ПО написать - пара, тройка вечеров, так как много универсального кода уже написано.
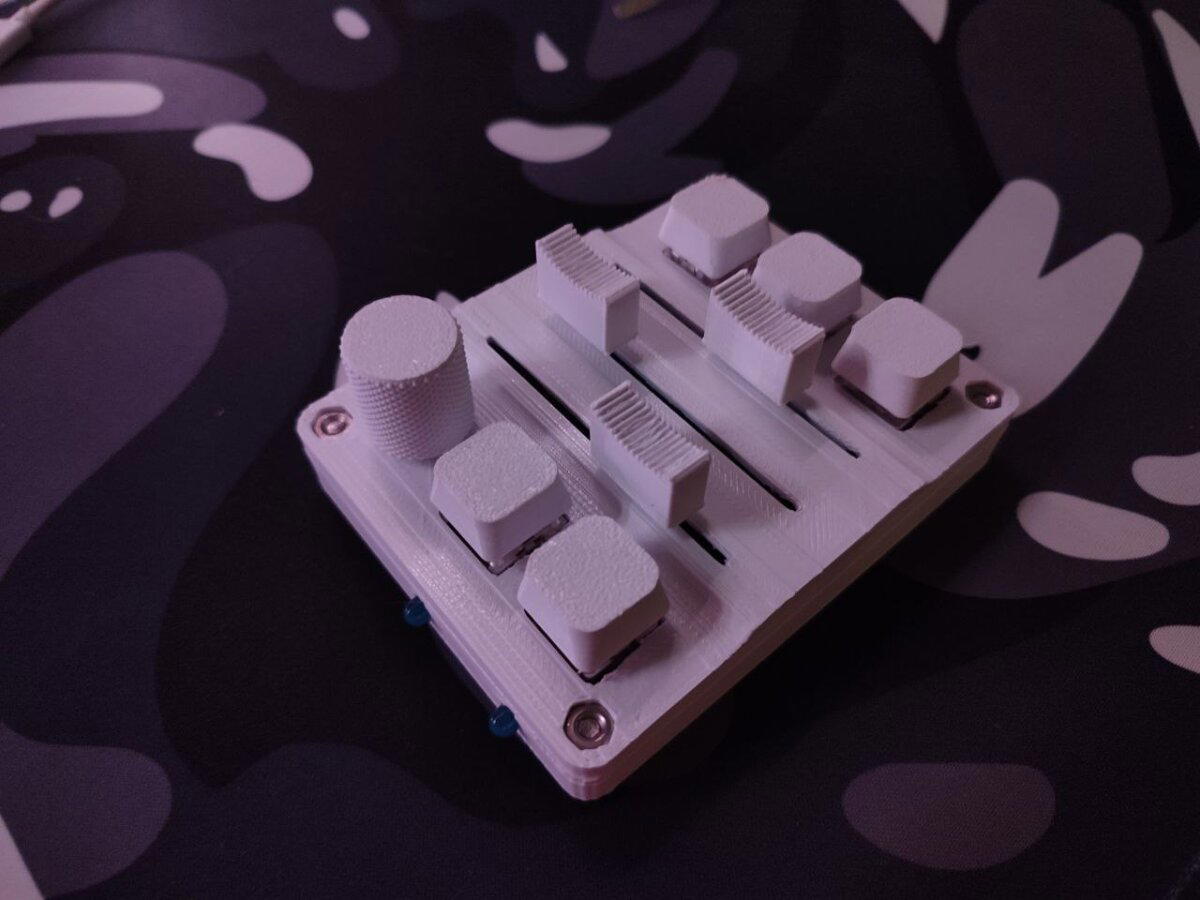
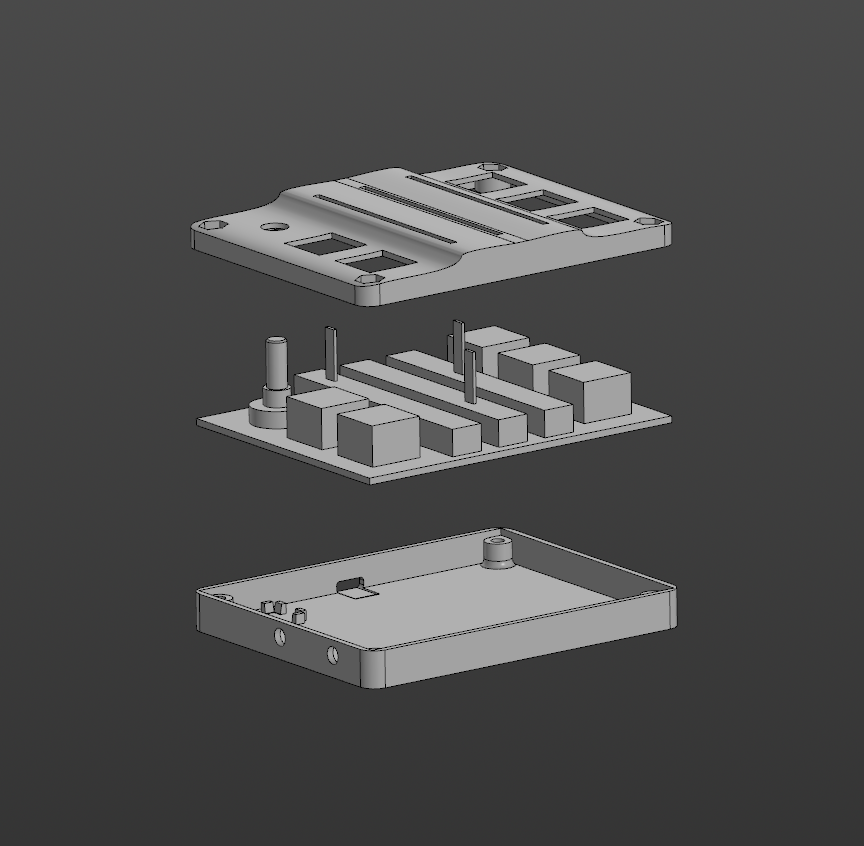
И главное, поштучное изготовление устройства(это очень важно, так как массовое значительно снижает цену единицы) для меня выходит где-то 150-500 рублей. Т.е. я могу обвешать всю квартиру датчиками и средняя цена за каждый будет 200 рублей(можно и дешевле, если делать устройство под конкретную задачу). Умная розетка чуть дороже, где-то 300-400 рублей.
При этом, как говорил ранее, я профессиональный системный программист. Функционал в устройствах достаточно широкий. К примеру, что первое в голову пришло: обнаружение устройств на шине, обновление прошивки, история событий, сенсорное, клавишное, кнопочное управление(обычный выключатель), порт расширения, датчики тока и прочее.
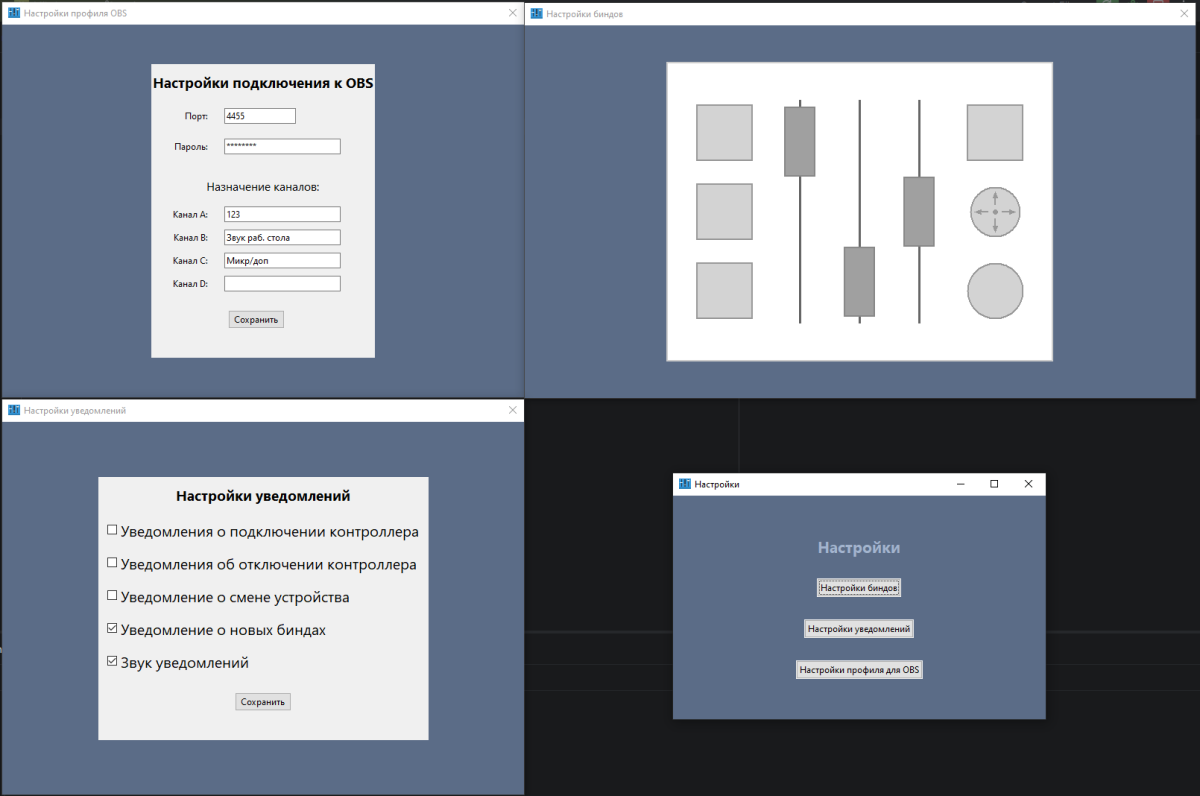
А про программную часть(сервер, контроллер клиент) я даже и говорить не буду. Функционал очень богатый и закрыты многие технические вопросы, о которых такие как Ксиаоми скорее всего даже и не задумывались.
Конечно есть области в которые я не добрался, что-то реализовано поверхностно, что-то содержит не критические баги. Клиент вообще без дизайна. Да и вообще, сейчас много мелких недоработок, так как проектом пользуюсь только я, и поэтому многих недочетов, которые легко исправить) не замечаю.
А гараж, в гараже было решение, временно снял. Доработал модули, но не доходят руки дописать и доделать некоторые вещи(например модуль бесперебойного питания и модуль радио интерфейса на базе LoRaWAN). По большей части потому, что там сейчас охранять нечего.
И ведь это не законченное решение, так как по большей части им пользуется только моя семья. И никто больше. Почему? Потому что:
1) Я не копирайтер, я не могу подать материал так, чтобы в нем кого-то заинтересовать в мире заваленном кучей беспроводных устройств с сильной рекламой
2) Я не дизайнер и не могу его отточить для удобоваримого восприятия конечным пользователем.
3) У меня скудная документация и скудная поддержка сторонних устройств (да, мой проект может, поддерживает и будет поддерживать много сторонних устройств)
4) Ну и у меня нет капитала, который я был бы готов вложить в серьезное развитие этого проекта. Достаточно того, что я вложил кучу своего опыта и личного времени.
В итоге, что я мог бы предложить в сравнении с современными решениями:
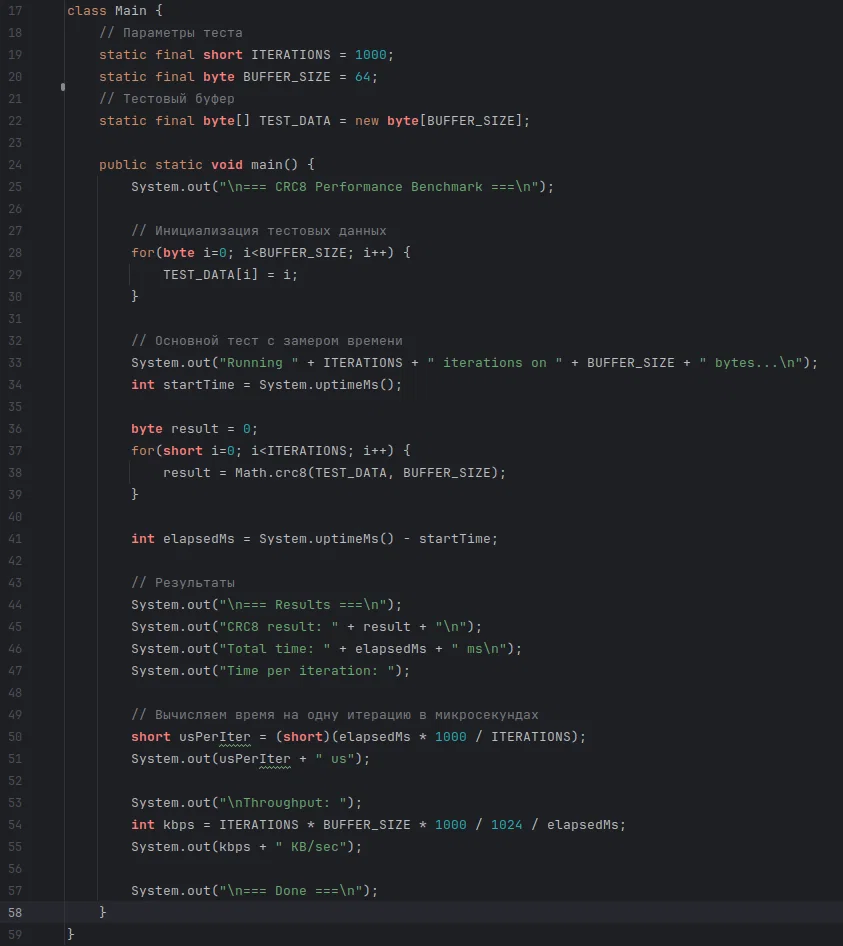
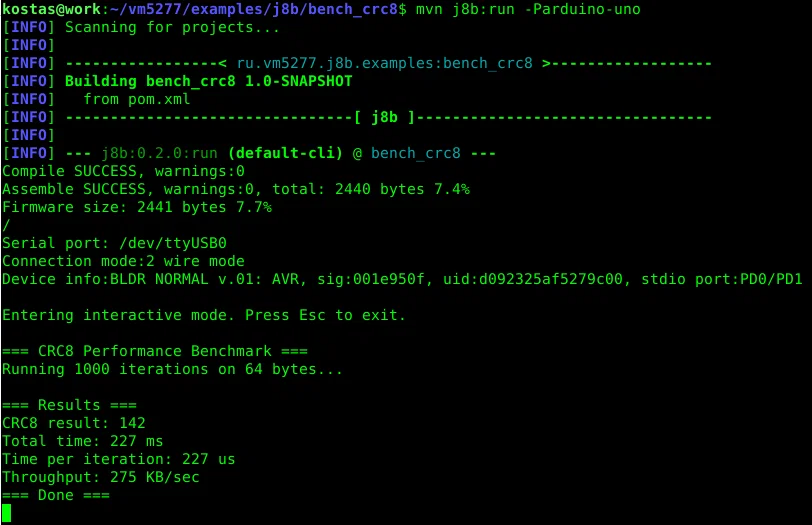
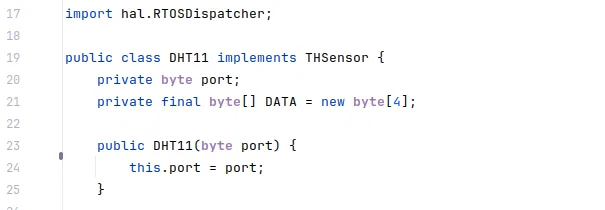
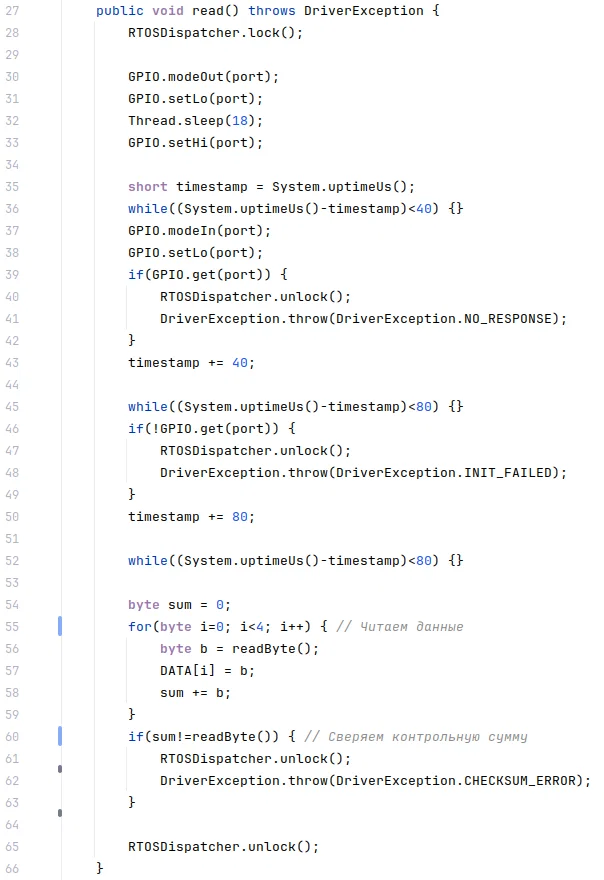
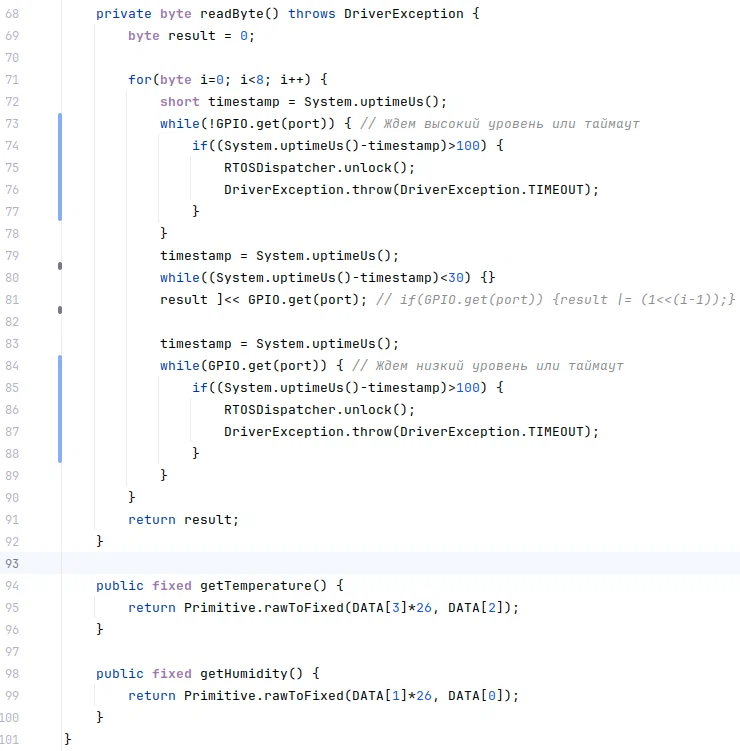
1) Бесплатное ПО(с минимальными ограничениями) в виде AS-IS(кроме сервера). При этом весь код написан на Java - любой знающий может проверить решение на вредоносный функционал. А клиентская часть реализована на Gluon Mobile, что позволяет практически один и тот-же Java код запускать почти везде.
2) Возможность ввести в систему любое не проприетарное устройство. В том числе и беспроводные шлюзы и устройства.
3) Исполнение контроллера на широком списке различных устройств(почти все где можно запустить Java SE 8
4) Информирование и различные точки управления типа Telegram, Алиса, СМС и прочее
5) Свой набор конечных устройств с проприетарным ПО
6) Рабочую систему даже без сервера и контроллера(но с ограничениями в функционале естественно)
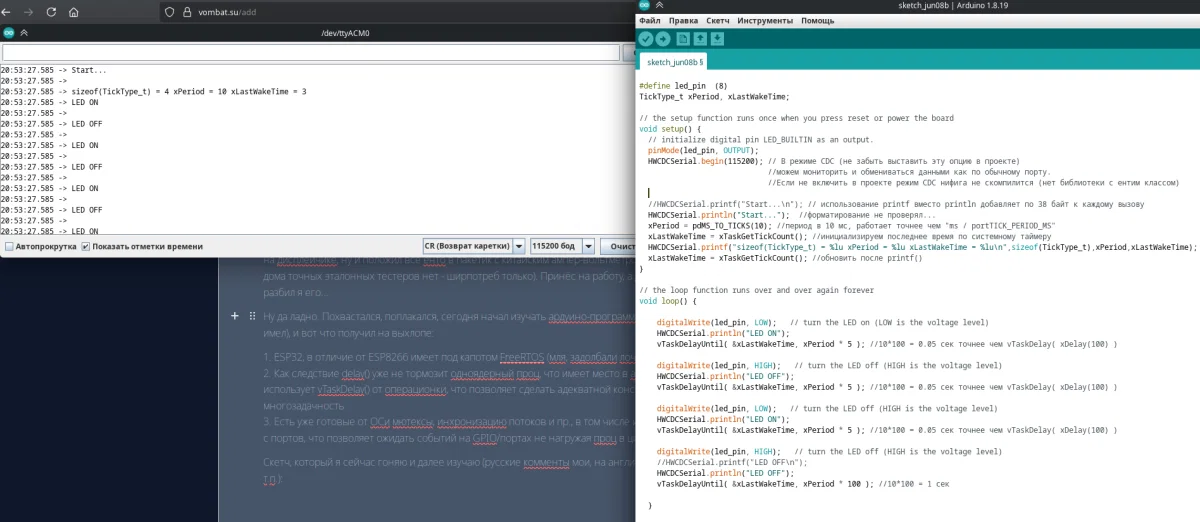
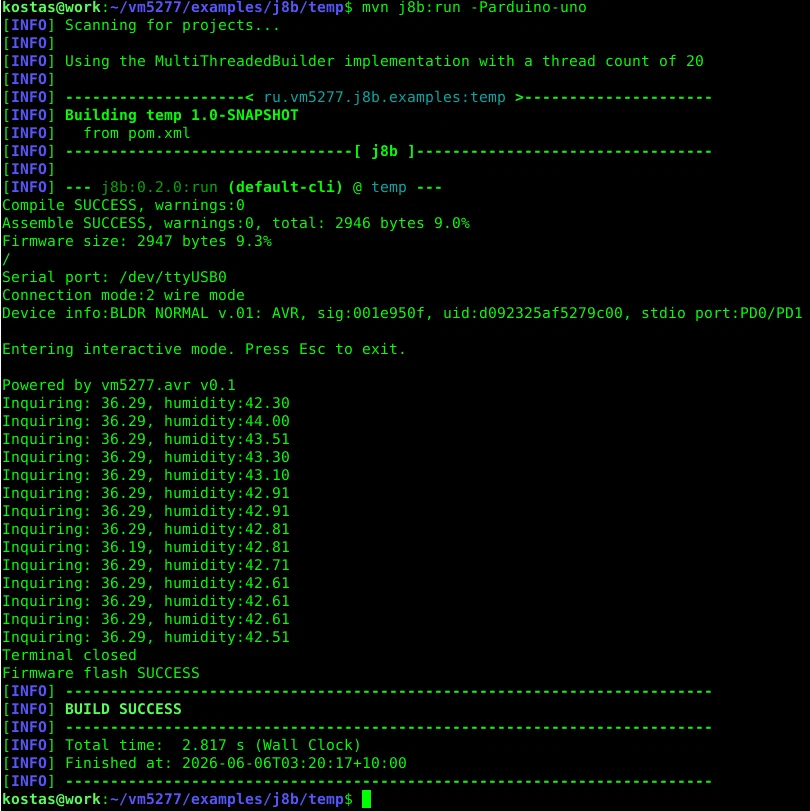
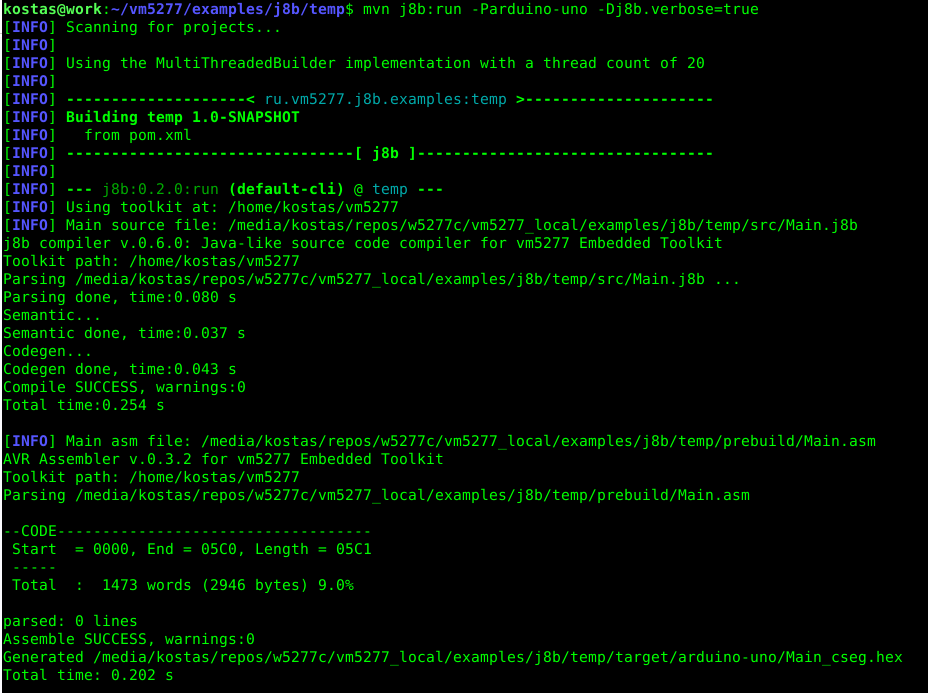
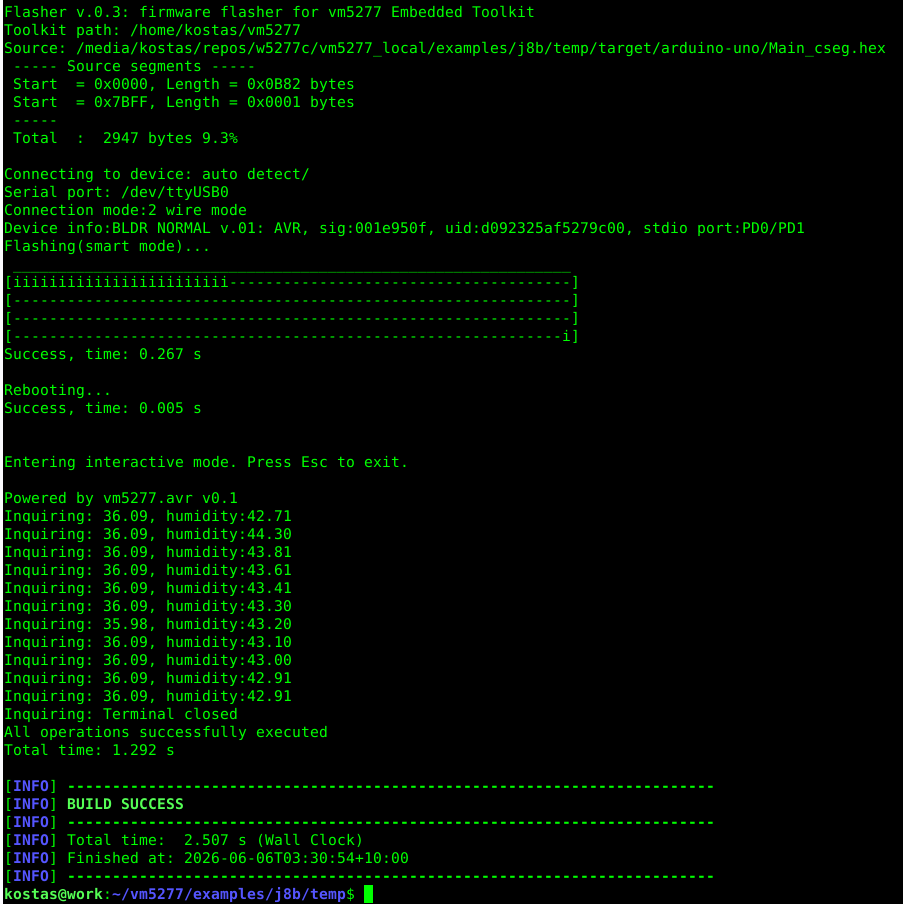
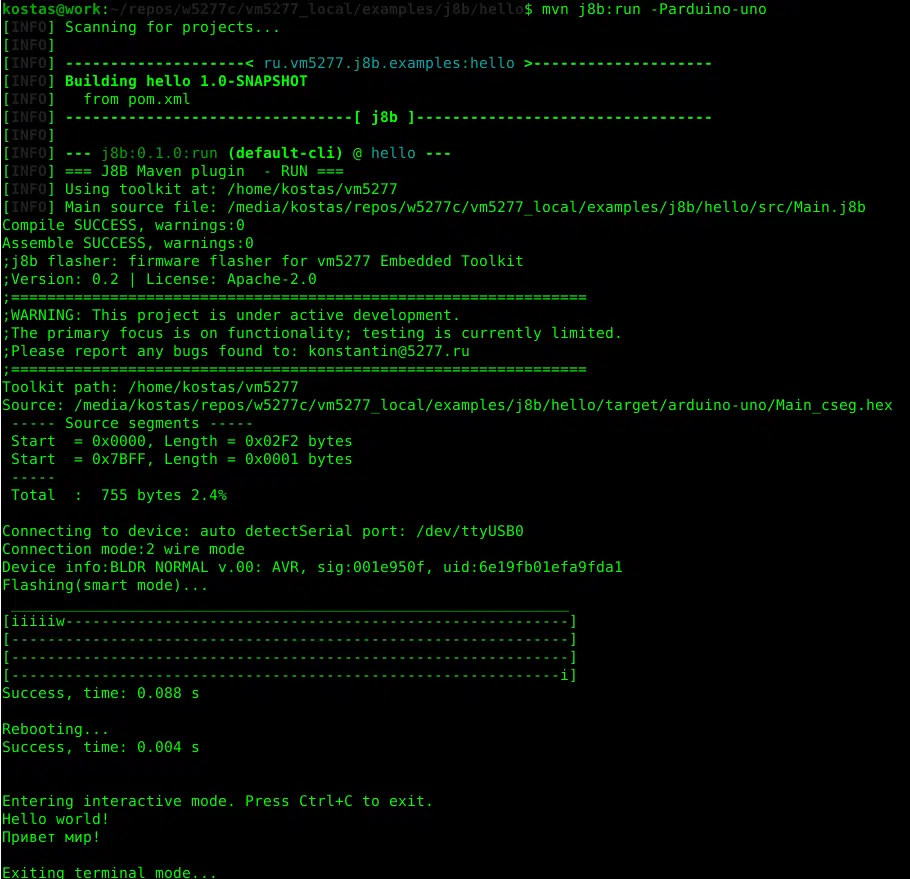
7) В основе открытый основной код конечных устройств - операционная система реального времени для AVR на ассемблере.
8) Полностью Российское решение, за исключением некоторых открытых библиотек и JRE
9) Конечно-же богатый функционал типа сценариев, скриптов и т.п.
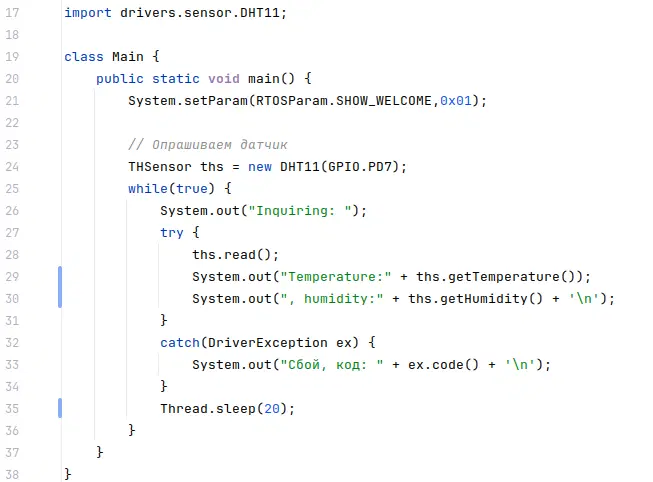
10) И важно, не нужно никакого умения и знаний в программировании или в написании конфигураций. Нужно просто понимать, что за устройство у вас в руках, как оно работает и как подключается. Но, никто вам не запрещает создавать свои устройства со своей прошивкой. Также в проект заложена возможность писать сценарии на Java.
Да, получилось сумбурно, знаю, но я даже не представляю как весь свой труд проделанный в течении многих лет описать в один пост. Это просто не возможно.
И главное. Я ни на что не рассчитываю, просто хотел показать как оно, по другому, бывает.